Des chercheurs de l'ETH Zurich dévoilent un robot d'IA ANYmal à quatre pattes capable de franchir des obstacles comme les K-9 dans un camp d'entraînement

ETH Züde riches chercheurs en robotique ont dévoilé un robot ANYmal quadrupède capable de naviguer sur des terrains complexes en utilisant des modules d'IA hautement entraînés pour le mouvement, la vision et la localisation. Ces modules de pointe élargissent la gamme d'obstacles et de terrains que les robots quadrupèdes peuvent parcourir de manière autonome.
Il a déjà été démontré que les "chiens" robotiques pouvaient naviguer dans des allées propres et des couloirs de bâtiments, ainsi que sur des collines et des terrains extérieurs, mais ils dépendaient de l'homme pour guider la formation, de longs temps de calcul pour déterminer la meilleure façon de se déplacer, ou d'une connaissance préalable de l'environnement. La recherche de l'ETH Zücontourne ces limitations, et l'ANYmal est capable de se remettre dynamiquement d'une chute et de naviguer sur des surfaces complexes bien qu'il ait été entièrement entraîné dans une simulation Nvidia Isaac Gym sans être supervisé simulation sans supervision.
Trois modules composant le cerveau de l'IA
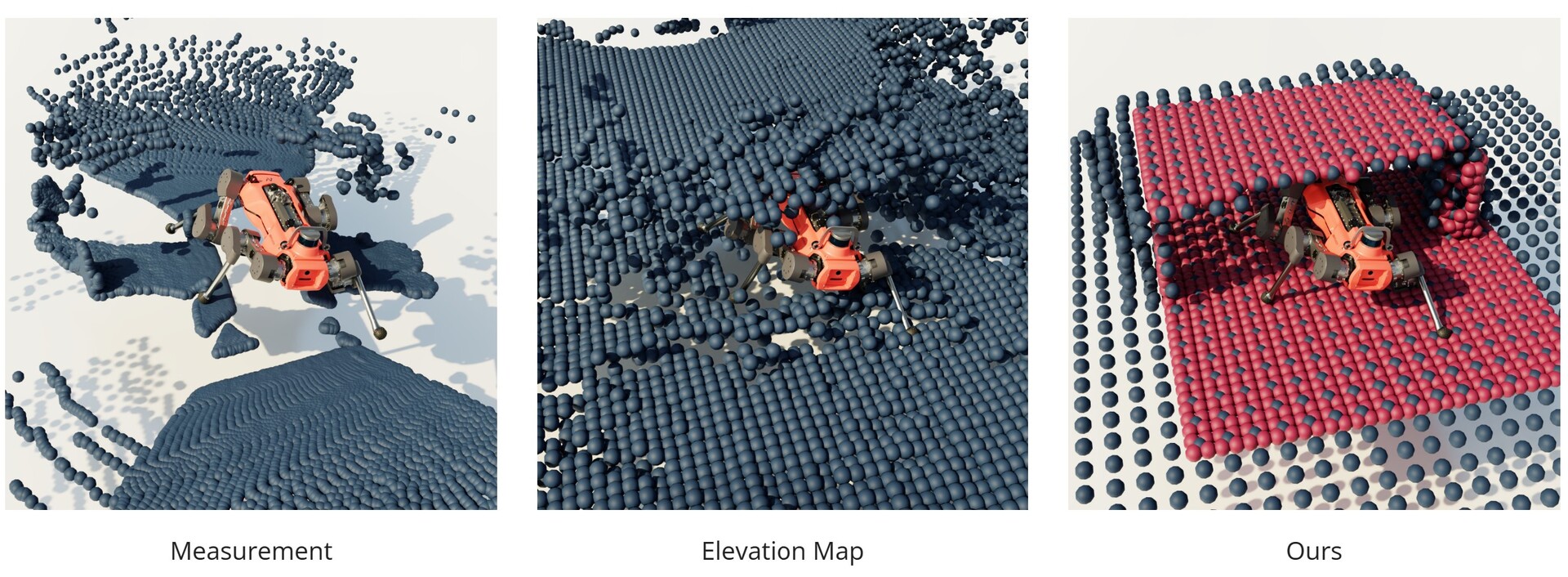
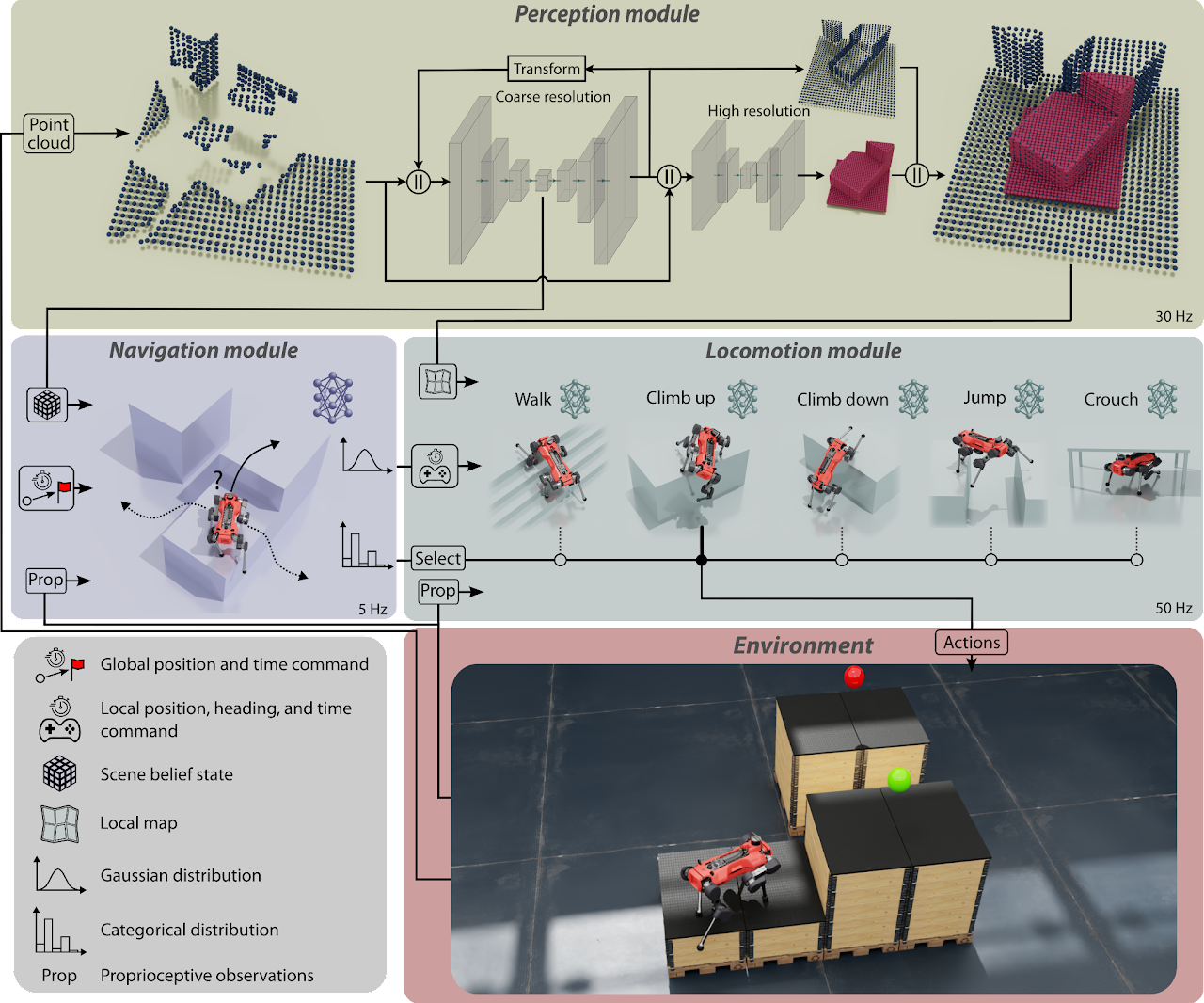
Le module de vision voit le monde à l'aide de six caméras de profondeur Intel Realsense et d'un LiDAR Velodyne alimenté par un contrôleur Nvidia Jetson Orin de Nvidia Jetson Orin. Étant donné que le balayage laser et infrarouge ne renvoie que la position de points individuels, les robots sont confrontés à des obstacles lorsqu'ils doivent passer sous des obstacles ou se rendre à des endroits plus élevés en raison des informations manquantes. Les chercheurs de l'ETH contournent ce problème en reconstruisant le monde en 3D à partir des scans.
Le module de mouvement comprend cinq actions : descendre, monter, s'accroupir, sauter et marcher. Chacune d'entre elles a été entraînée dans le cadre de défis de plus en plus difficiles à relever. Par exemple, le robot virtuel a été entraîné à s'accroupir sous des tables de plus en plus basses tout en avançant, ou à sauter d'une plateforme à l'autre alors que l'écart augmentait.
Le module de navigation prend ce que le module de vision voit et apprend à le combiner avec le cap, la position et la synchronisation que chaque compétence de mouvement requiert pour accomplir des parcours simulés difficiles. Le module a été entraîné sur 3 000 parcours tests et a appris à naviguer avec plus de 96 % de réussite.
ANYmal en action
Une fois les trois modules entraînés en simulation, le cerveau du logiciel d'IA a été installé dans un robot ANYmal D de 55 kg équipé de deux processeurs Intel i7, de 8 Go de RAM et d'un disque dur SSD de 240 Go. Des vidéos de l'ANYmal en train d'effectuer des parcours dans la vie réelle montrent sa capacité à surmonter rapidement des terrains difficiles et des obstacles qui arrêteraient d'autres robots.
Les lecteurs intéressés par le développement de compétences en robotique devraient se procurer un kit(comme celui-ci sur Amazon) ainsi qu'un livre pour apprendre à connaître les robots(comme celui-ci sur Amazon).
Source(s)

