Noël pour les ma(r)kers : des décorations de sapin personnalisées réalisées par un robot
Un Spherebot ou Eggbot dessine des motifs à partir d'un PC sur tout ce qui est rond. Via thingiverse.com et instructables.com, on peut trouver plusieurs tutoriels et modèles pour ces petits robots, que l'on pourrait aussi appeler traceurs de sphères. La liste des matériaux est assez similaire pour la plupart des Spherebots. Deux moteurs Nema 17, un petit servo, un Arduino Uno, un shield CNC et des pilotes de moteurs pas à pas sont nécessaires. En outre, il faut une alimentation électrique, des vis, des câbles, des billes et des marqueurs assortis. Sur Amazon, la liste complète du matériel coûte environ 50 dollars. Si vous disposez d'une imprimante 3D, vous pouvez probablement emprunter ses moteurs Nema 17 et ses pilotes de moteur pas à pas pour ce projet

Instructions et manuels de construction
Il existe de nombreuses instructions plus ou moins simples pour un Eggbot sur diverses pages de bricolage commeinstructables et thingiverse. La plupart d'entre elles peuvent être réalisées avec une imprimante 3D. Au moins 20 de ces Eggbots peuvent être trouvés sous différents noms via thingiverse.com. J'ai rassemblé une petite sélection dans une collection ici. Les amateurs ingénieux peuvent probablement se passer d'une imprimante 3D pour certains modèles et ne travailler qu'avec du contreplaqué, des vis, des roulements à billes et quelques supports. J'ai choisi la conception d'Herbert Schützeneder, que je trouve très intelligente. La plupart des pièces de son Eggbot sont imprimées en 3D. En fait, la liste des courses est très similaire pour la plupart des Eggbots. C'est aussi parce que l'original par Evil Mad Scientist est disponible en tant que projet open-source depuis plusieurs années. Ainsi, pour la plupart, seuls des ajustements sont nécessaires pour adapter les répliques à différentes méthodes de fabrication.
Nomenclature pour l'Eggduino par Herbert_b1 :
2 × Moteur pas à pas Nema 17
1 × Kit CNC avec clone Arduino Uno
1 × Servomoteur SG90 ou KY66
1 × vis M3
1 × roulement à billes 608
1 × condensateur de 10 µF à 100 µF
1 × convertisseur AC/DC délivrant une tension entre 12 V et 24 V
quelques marqueurs (permanents)
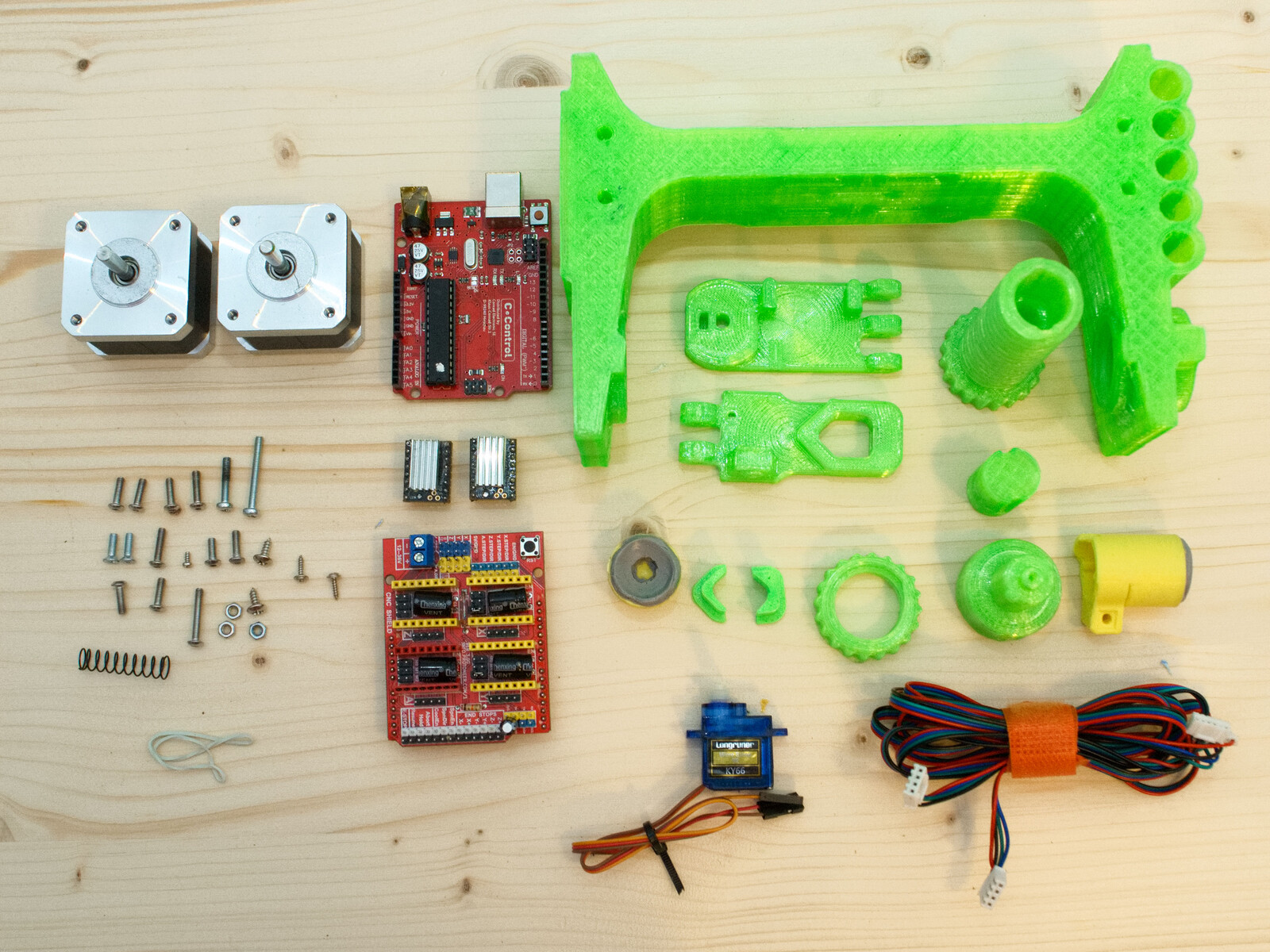
Dans mon cas, les moteurs pas à pas et les pilotes de moteurs pas à pas TMC2100 proviennent d'une imprimante 3D qui n'est plus utilisée. Comme alimentation, j'utilise une vieille brique d'ordinateur portable avec 19 V. La tension plus élevée est plus un avantage pour le CNC-Shield puisque le clone Arduino Uno est alimenté par USB. Avec une tension plus élevée, les moteurs peuvent être entraînés avec moins de courant. Il en résulte une moindre dissipation de la chaleur au niveau des moteurs et de l'électronique. Je n'ai pas non plus eu besoin d'acheter un roulement à billes, puisque les roulements à billes 608 sont les mêmes que ceux des skateboards et des patins à roues alignées.
Logiciels - Téléchargement, installation et modification
L'Arduino Uno (clone) est programmable à l'aide de l'IDE Arduino. L'application peut être téléchargée sur www.arduino.cc/en/software ou acquise auprès de diverses sources. Sous Windows, l'application peut également être installée via le Microsoft Store https://www.microsoft.com/store/productId/9NBLGGH4RSD8
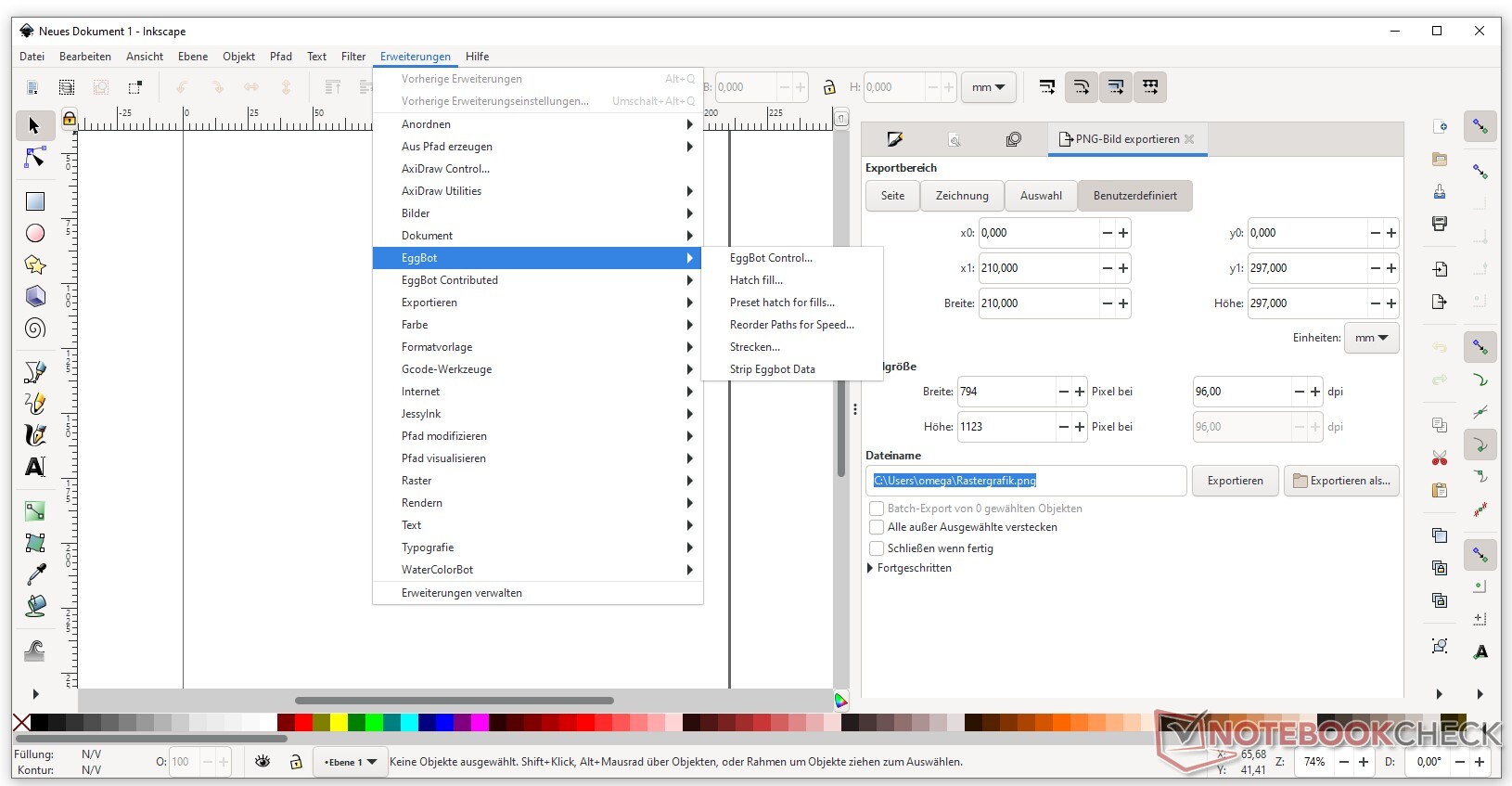
Pour créer les images et les motifs de la boule de l'arbre de Noël, l'application open source Inkscape avec une extension EggBot est nécessaire. La dernière version 1.1 peut être téléchargée via la page de publication .
Un firmware prêt à l'emploi pour l'Arduino Uno (clone) est disponible sur Github dans le dépôt Eggbot par Plex3r. Ici, vous pouvez commencer le téléchargement de sous forme de fichier zip en cliquant sur l'élément de code vert. Les instructions de Plex3r pour modifier l'extension Eggbot ne fonctionnent malheureusement pas avec les nouvelles versions du logiciel.
La dernière version d'EggBot 2.81 est téléchargée depuis le dépôt de Evil Mad Scientist et modifiée à la place. Vous aurez besoin des deux archives eggbot-inkv1r2.zip et EggBotExamples_v281.zip dans le dossier de la version.
Programmation de l'Arduino Uno
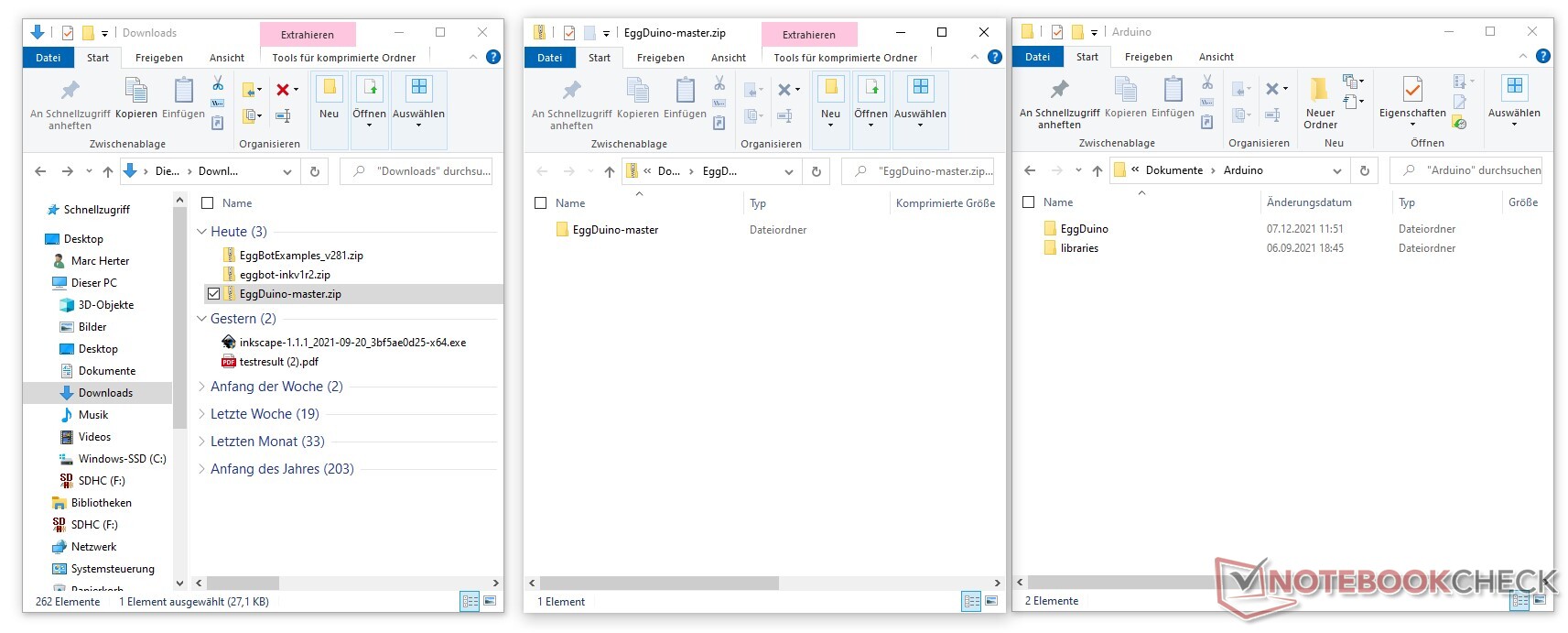
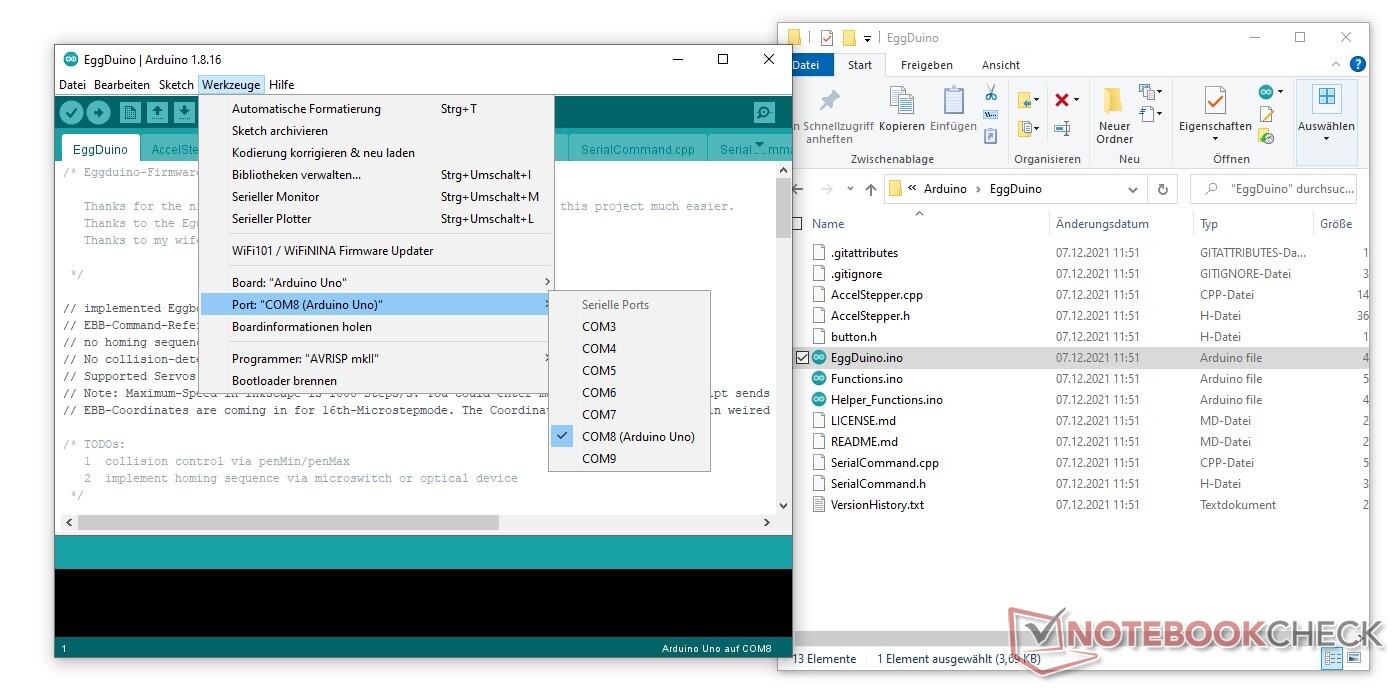
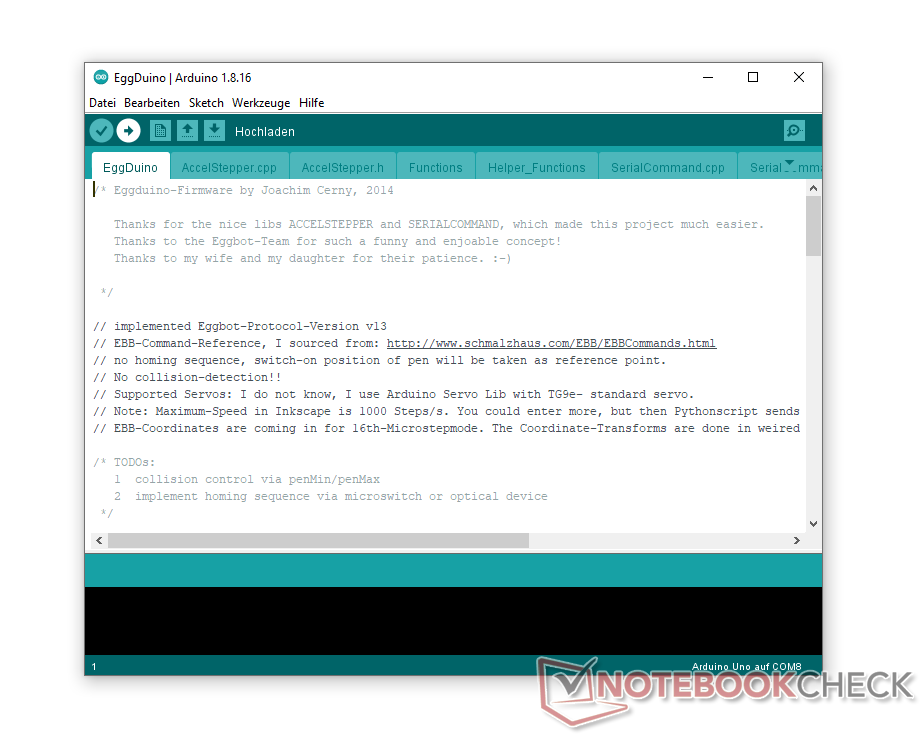
Après l'installation de l'IDE Arduino, ouvrez le fichier EggDuino-master.zip et décompressez-le dans le dossier utilisateur Documents/Arduino. Pour que l'IDE puisse travailler avec le contenu du dossier, celui-ci doit être renommé en EggDuino. Double-cliquez sur EggDuino.ino dans le dossier renommé EggDuino pour ouvrir le fichier. Maintenant vous pouvez connecter l'Arduino Uno (clone) à l'ordinateur via le câble USB. Sélectionnez la carte avec Outils>Port. Ensuite, vous téléchargez le programme tel qu'il est. Plus tard, tout est connecté de manière à ce que le pinout programmé corresponde.
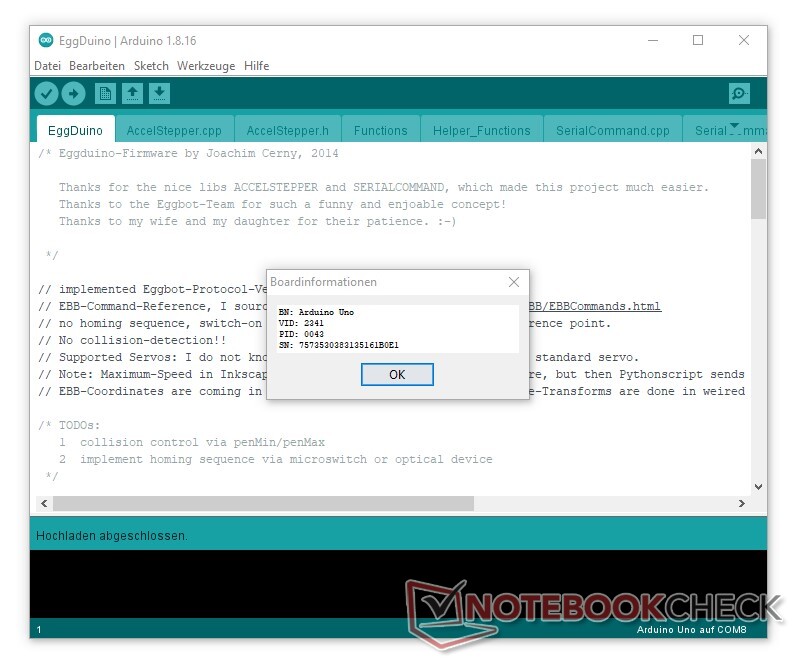
L'ID matériel de la carte de développement est nécessaire pour adapter l'extension EggBot pour Inkscape à l'EggDuino dans l'étape suivante. Cet ID peut être récupéré avec l'IDE Arduino via Tools>Get Board Information. Le VID et le PID peuvent être copiés par CTRL+C et ensuite collés dans un fichier texte.
Installation et modification de l'extension EggBot
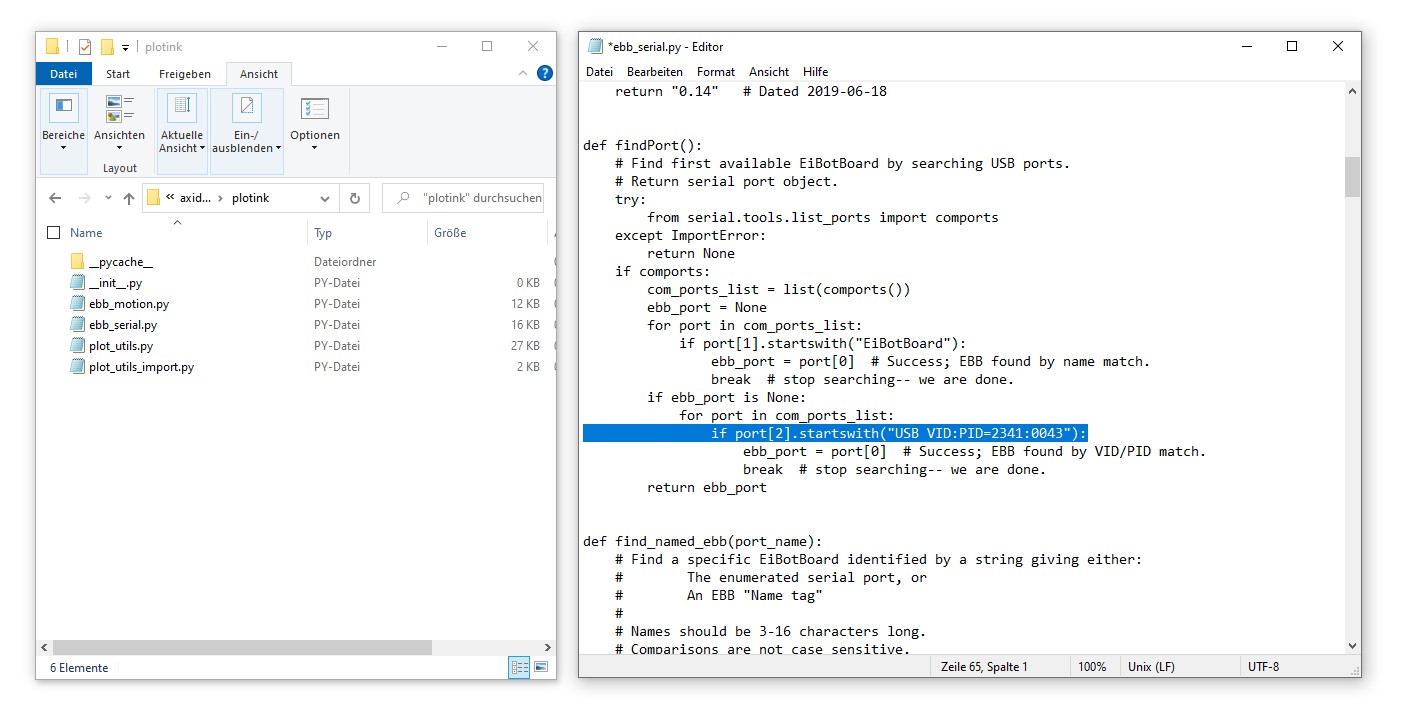
Le fichier zip eggbot-inkv1r2.zip contient l'extension EggBot complète pour Inkscape. Néanmoins, cette extension doit être adaptée à l'EggDuino avant de pouvoir être intégrée dans Inkscape. Dézippez d'abord l'archive à un endroit arbitraire. Dans le dossier décompressé, cherchez le fichier ebb_serial.py. Il est situé sous eggbot-inkv1r2axidraw_depsplotink. Ouvert avec l'éditeur, le script Python peut être édité. A la ligne 65 [ if port[2].startswith("USB VID:PID=04D8:FD92") : ] l'ID matériel de l'EggBot original est recherché par le script. Cela doit être changé en Eggduino avec les valeurs précédemment déterminées pour VID et PID.
Donc dans mon cas la nouvelle ligne est : [ if port[2].startswith("USB VID:PID=2341:0043") : ]
Puisque tous les Arduino Uno et ses clones n'ont pas le même hardware-ID, copier simplement mon changement peut ne pas mener au succès.
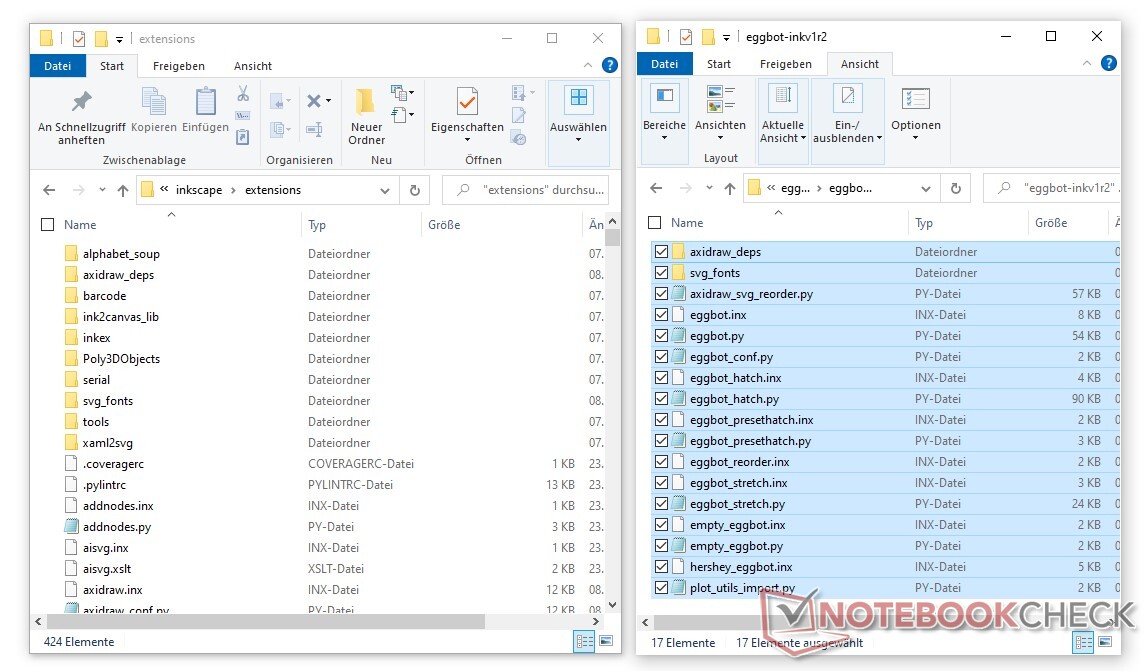
Après avoir enregistré la modification, le contenu complet du dossier eggbot-inkv1r2 sera transféré dans le dossier des extensions d'Inkscape 1.1. Si le répertoire d'installation par défaut n'a pas été modifié lors de l'installation, il se trouve à :
C:Program FilesInkscapeshareinkscapeextensions
Si vous ouvrez maintenant Inkscape, vous devriez pouvoir trouver Eggbot sous Extensions.
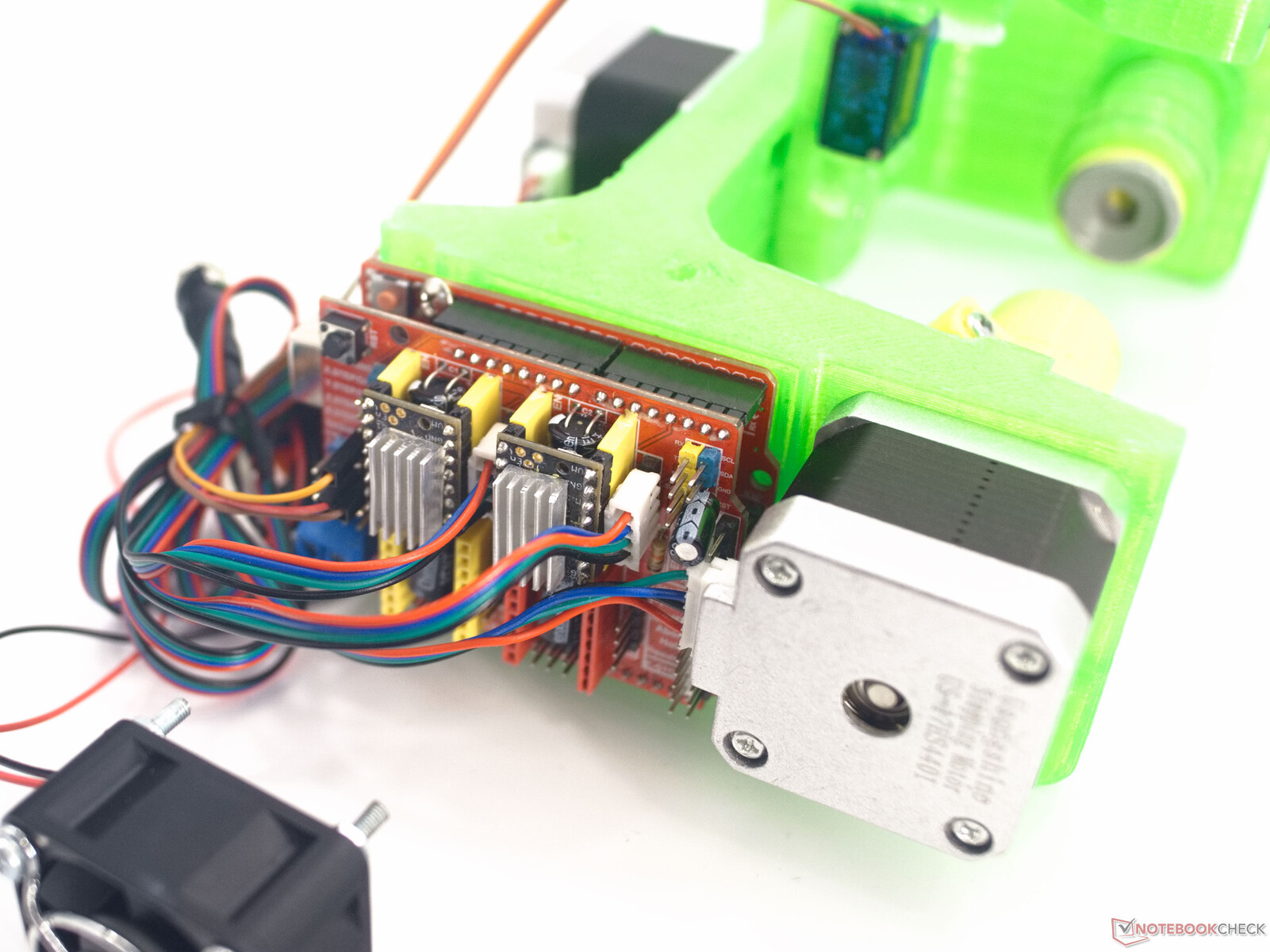
Montage
L'assemblage général des composants devrait être simple, mais le câblage peut être un peu plus délicat. Comme l'Arduino Uno est très tolérant, les erreurs ne sont, en général, pas un gros problème
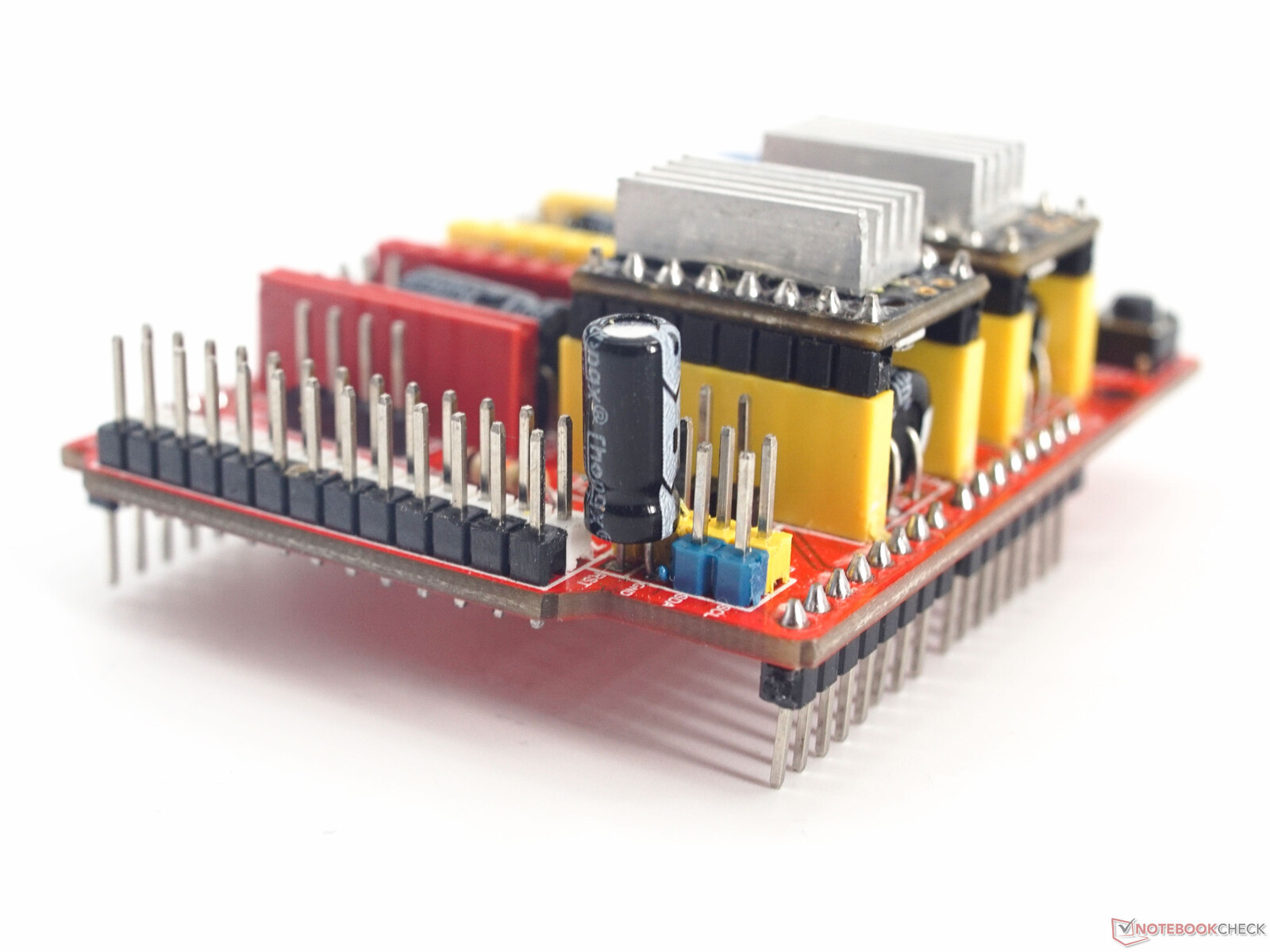
pilotes de moteurs pas à pas
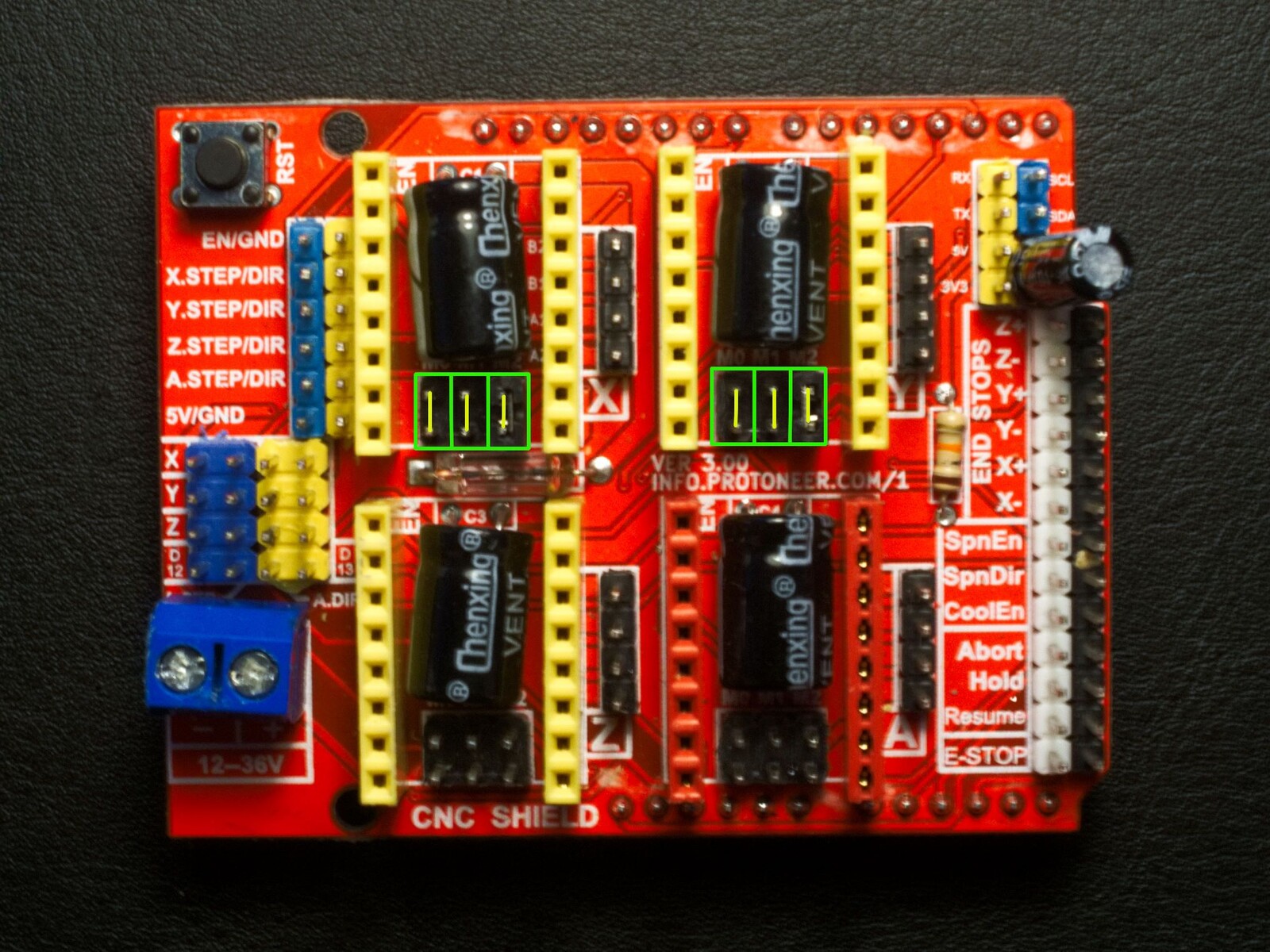
Tout d'abord, les cavaliers doivent être réglés pour ajuster le micro-pas. Selon le pilote du moteur pas à pas, les cavaliers doivent être réglés différemment. L'idée est d'obtenir un micropas de 1/16. Avec les pilotes A4988 inclus dans le kit CNC du lien ci-dessus, les trois cavaliers doivent être réglés. Dans l'image à droite, les endroits correspondants sont marqués en vert et les connexions en jaune. M0, M1 et M2 doivent être connectés. Pour l'Eggbot, seuls les moteurs X et Y sont nécessaires
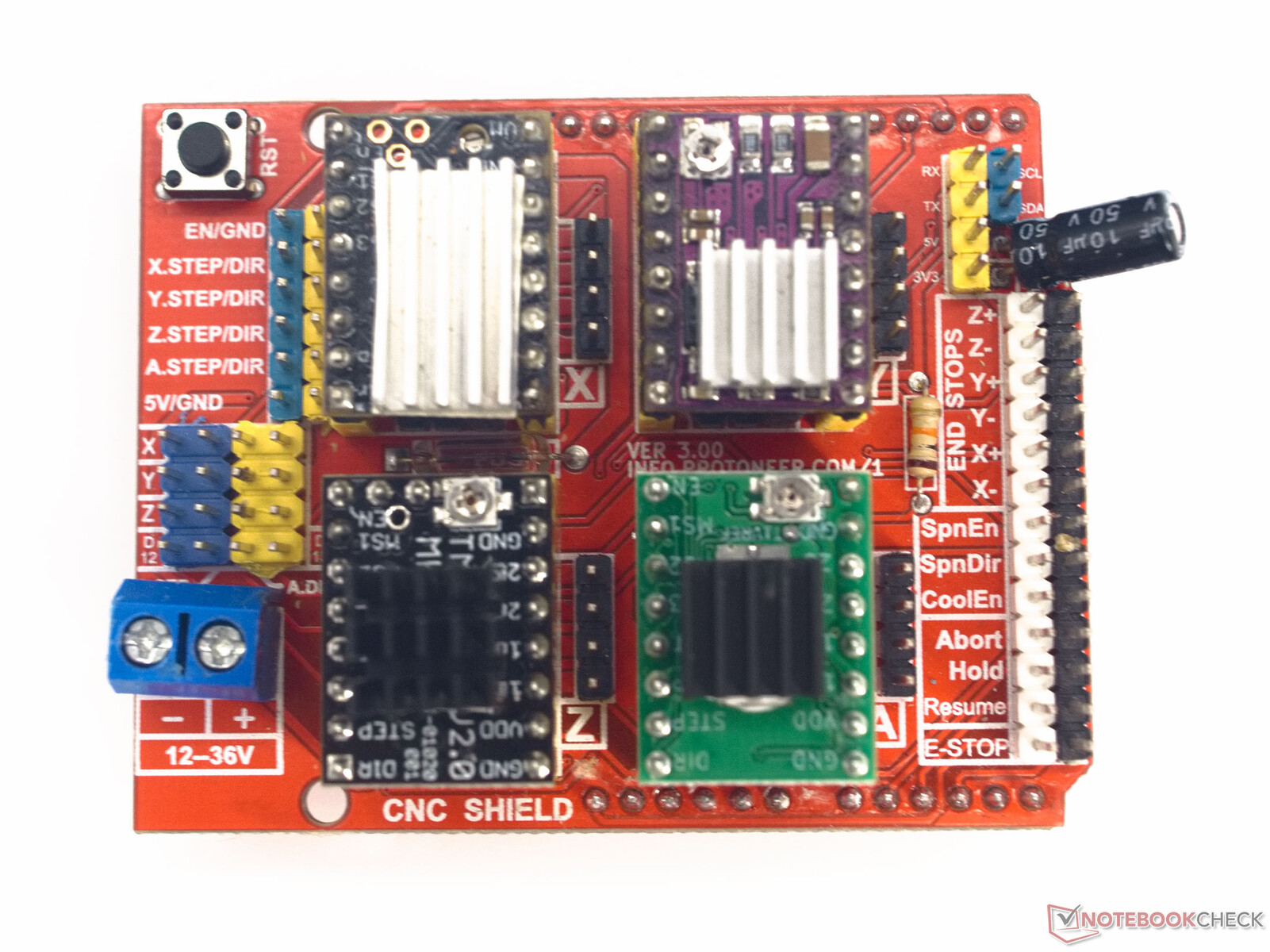
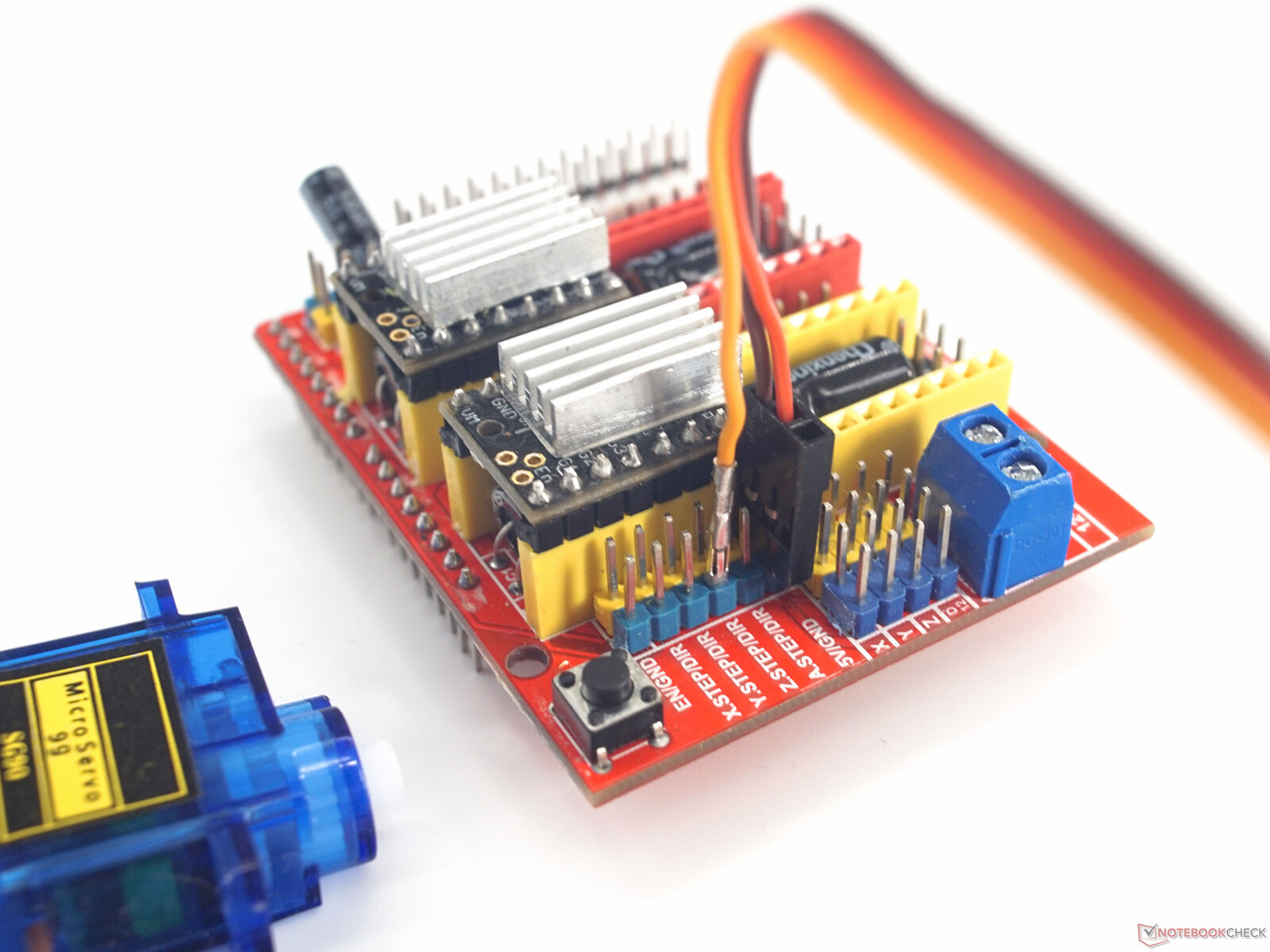
À l'étape suivante, les dissipateurs thermiques sont collés sur les pilotes de moteur pas à pas et les pilotes sont branchés dans les fentes pour X et Y. Ici, vous devez faire attention à l'alignement. Normalement, la broche EN est marquée sur tous les pilotes de moteurs pas à pas compatibles Pololu. Elle doit être connectée à la prise EN de la CNC-shield, ce n'est qu'alors que l'alignement est correct
Veuillez vous référer à la fiche technique du fabricant respectif pour des informations sur les tensions et les réglages pour le micro-pas et le courant.
Désactiver la réinitialisation automatique de l'Arduino Uno
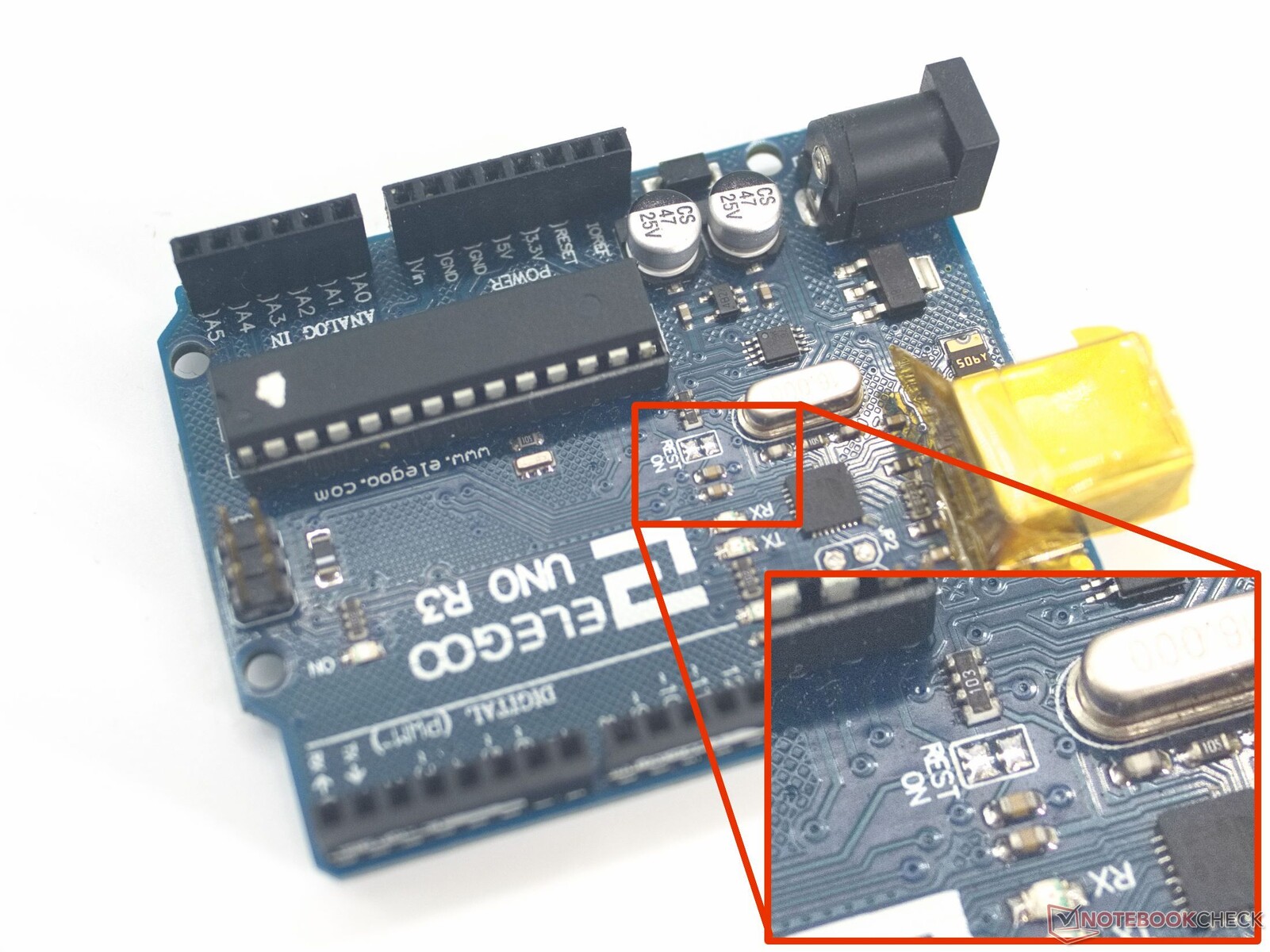
Pour une connexion correcte avec Inkscape, il est nécessaire de désactiver l'auto-reset sur l'Arduino. La première possibilité est de déconnecter un contact sur l'Arduino UNO. Sur les cartes, il y a toujours un contact de pontage, qui est marqué comme REST-EN ou REST-ON. Après la programmation de la carte, ce contact peut être déconnecté avec un couteau. Si vous avez besoin de l'auto-reset à nouveau, vous pouvez mettre un pont de soudure.
Il est également possible de désactiver l'auto-reset avec un condensateur entre la broche reset et la broche GND sur le blindage de la CNC. Le condensateur doit avoir une capacité d'au moins 10 µF. Un condensateur électrolytique est soudé avec sa broche négative sur la broche GND de la CNC-Shield. Les condensateurs en céramique et en feuille n'ont pas de polarité. La rigidité diélectrique du condensateur doit être d'au moins 1,5 fois la tension de l'alimentation sélectionnée.
Câblage
Tous les Eggbots utilisent deux moteurs pas à pas et un servo. Le moteur pas à pas qui fait tourner la balle ou l'œuf est connecté aux contacts du X-driver, le moteur pas à pas pour le bras du stylo est connecté aux contacts à côté du Y-driver. La façon dont les deux connecteurs sont connectés ne change que le sens de rotation. Cela peut être inversé plus tard dans Inkscape.
Les trois fils du servomoteur sont connectés aux broches 5V, GND et Z.STEP de la CNC-Shield. Le câble noir à GND, le rouge à 5V et le jaune à Z.STEP.
Configuration du logiciel et traçage
Une fois que tout est assemblé, l'Arduino peut être connecté au PC et la CNC-Shield à l'alimentation électrique. Dans Inkscape, vous appelez maintenant le panneau de contrôle de l'Eggbot, et ici vous devez encore régler les paramètres du servomoteur et le sens de rotation des moteurs pas à pas. Pour trouver les bons réglages, vous devez faire quelques expériences.
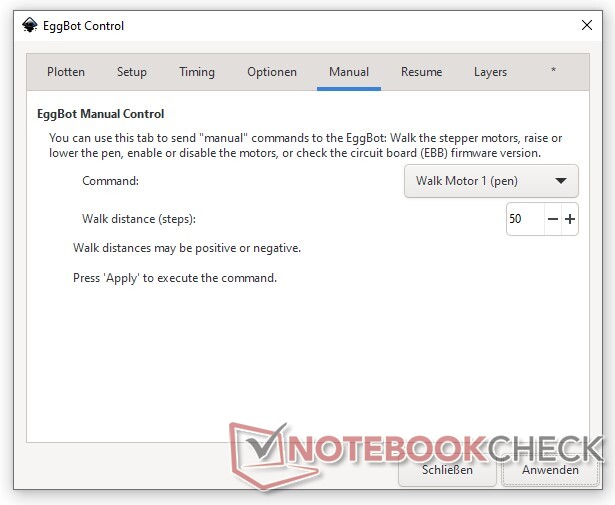
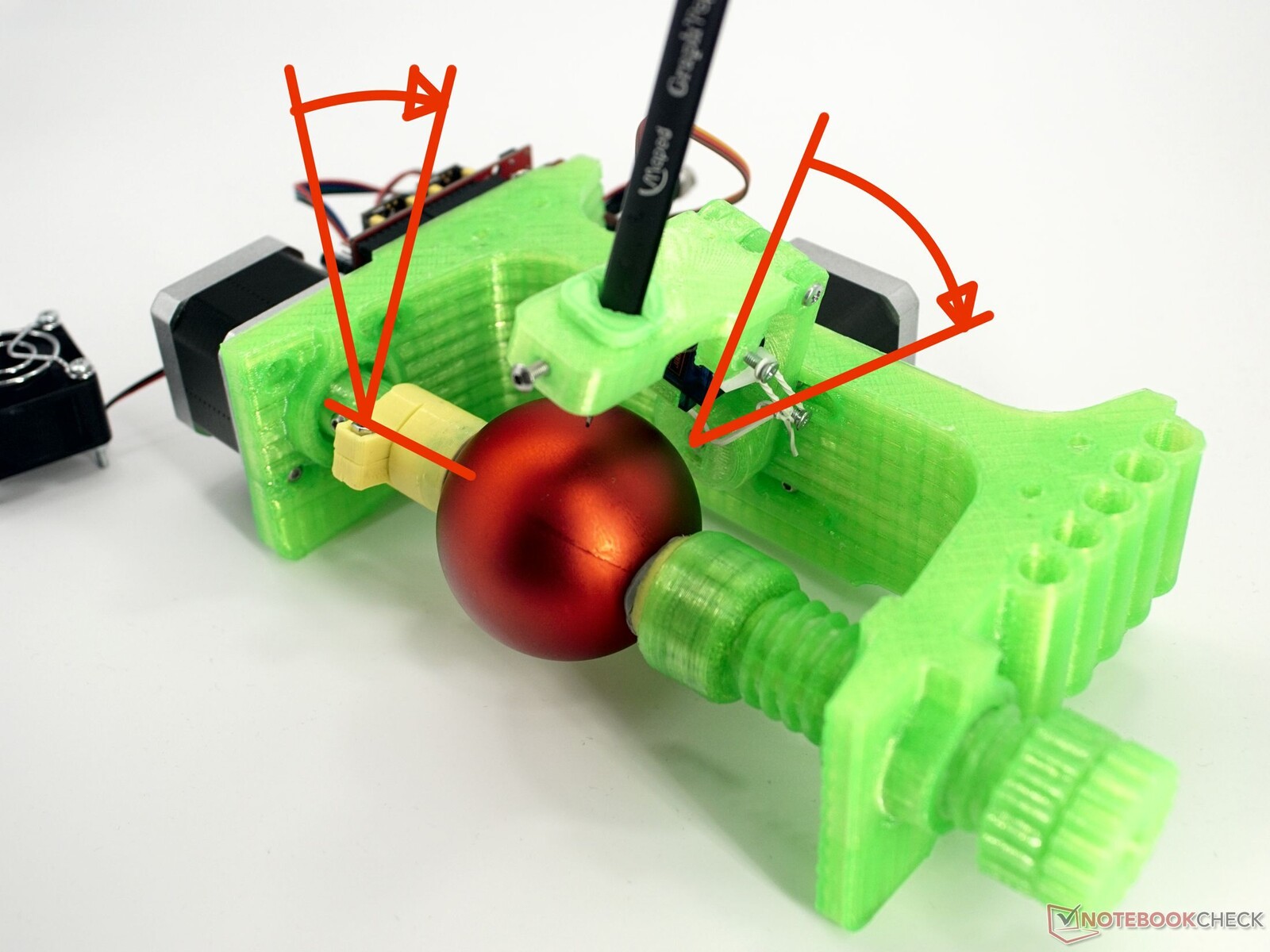
Dans l'onglet Manual, vous pouvez d'abord déterminer le sens de rotation du bras du stylo. Sélectionnez Walk Motor 1 (Pen) dans le menu déroulant et entrez une valeur positive en dessous, puis cliquez sur Apply. Le stylo devrait maintenant se déplacer vers l'extrémité de la boule avec le crochet de l'ornement. Ainsi, selon le sens dans lequel vous voulez serrer les boules, c'est vers la gauche ou vers la droite. Répétez le même processus avec l'élément de menu sélectionné, Moteur de marche 2 (Œuf). La boule doit tourner dans le sens des aiguilles d'une montre lorsqu'on la regarde depuis le point de suspension.
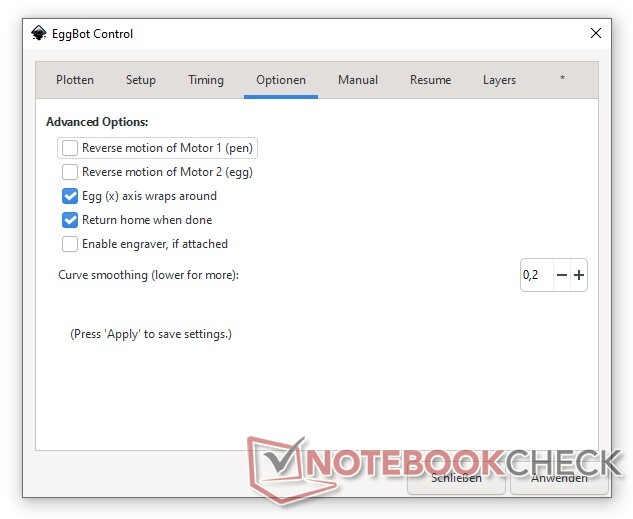
Si les sens de rotation ne correspondent pas, la case Inverser le mouvement du moteur doit être cochée ou supprimée pour le moteur correspondant dans l'onglet Options.
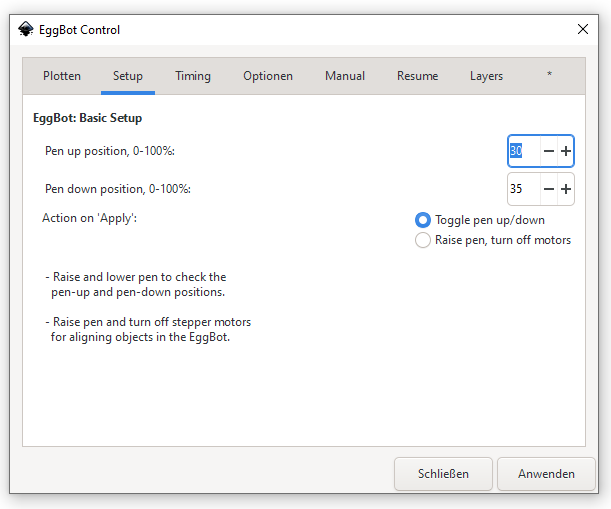
Les valeurs du servomoteur doivent également être ajustées. Ici, cela dépend si vous avez un servomoteur avec un sens de rotation positif ou négatif. Dans mon cas, la valeur à régler dans Eggbot Control Setup pour la position haute du stylo est plus petite que la position basse du stylo. Vous devrez peut-être essayer plusieurs valeurs pour trouver les bonnes.
Traceur
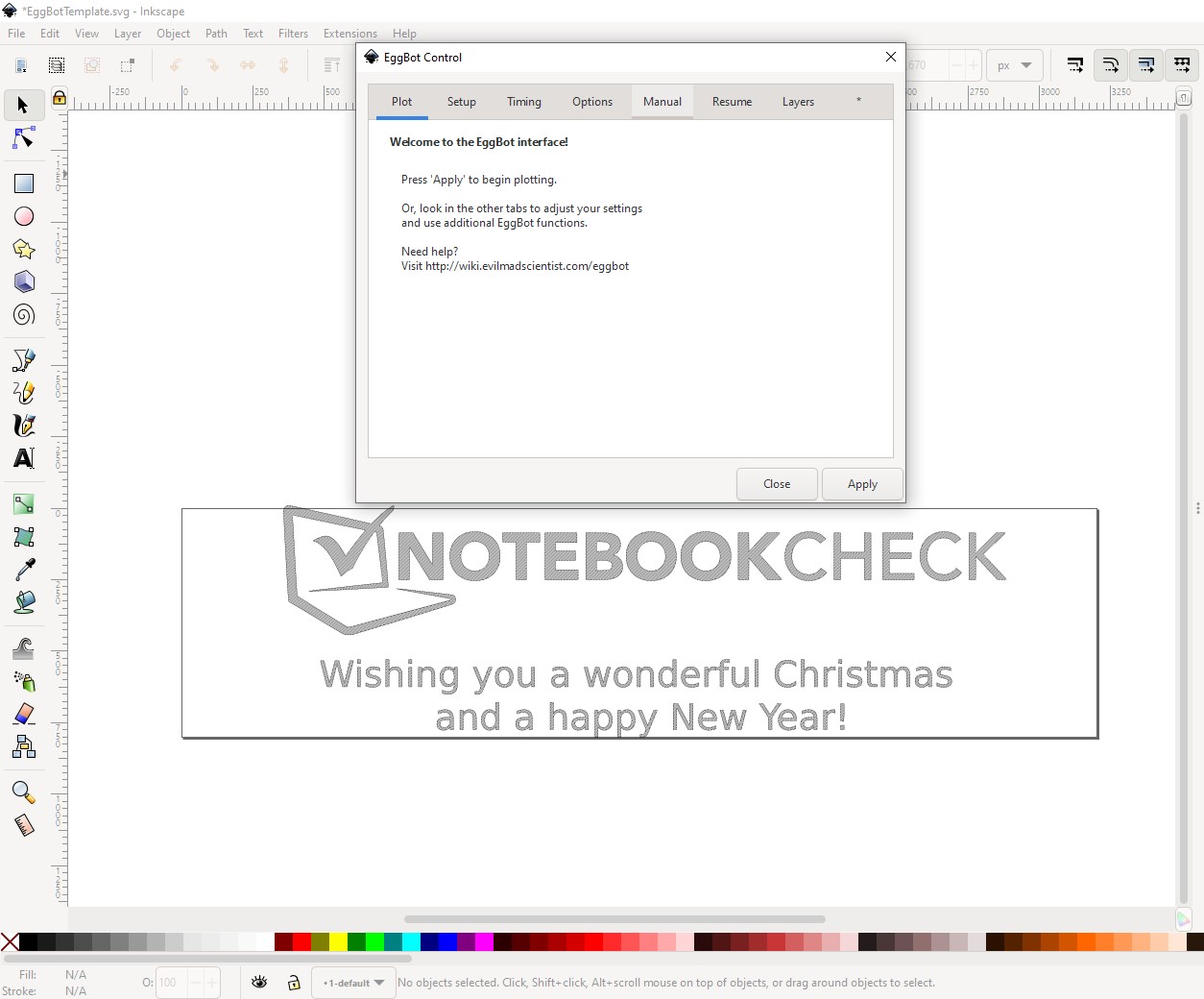
Une fois que tout est assemblé, installé et paramétré, vous pouvez enfin commencer à dessiner. Dans l'archive EggBotExamples_v281.zip se trouvent quelques modèles pour différentes occasions. Ceux-ci peuvent être chargés, modifiés et dessinés comme vous le souhaitez. Le fichier EggBotTemplate.svg sert de modèle pour vos dessins. Lorsque vous ouvrez certains modèles, Inkscape vous demandera probablement si quelque chose doit être modifié dans les fichiers, car ils ont été créés avec une ancienne version d'Inkscape. La nouvelle extension Eggbot a été adaptée à Inkscape 1.1 de telle sorte que vous devez sélectionner ici "Ce fichier est destiné à être affiché à l'écran ...", sinon la sortie sur l'Eggbot sera déformée.
Une fois le dessin terminé, vous n'avez rien d'autre à faire que de le tracer via le centre de contrôle Eggbot. Cliquez simplement sur "Appliquer" dans l'onglet Tracé.

Sources

